
Mouvement d'un solide sur un plan incliné - Ts
Classe:
Terminale
I. Rappels
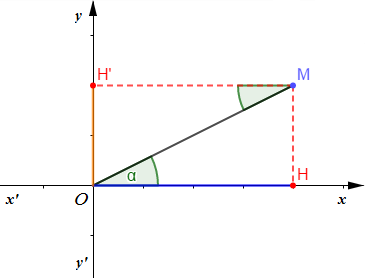
Considérons un repère orthonormé $(O\;;\ \vec{i}\;,\ \vec{j})$ et soit $M$ un point.
Si $H$ et $H'$ sont les projetés orthogonaux de $M$ respectivement sur les axes $(x'x)$ et $(y'y)$ alors on a : $$\left\lbrace\begin{array}{rcl} OH&=&OM\cos\alpha\\OH'&=&OM\sin\alpha\end{array}\right.$$
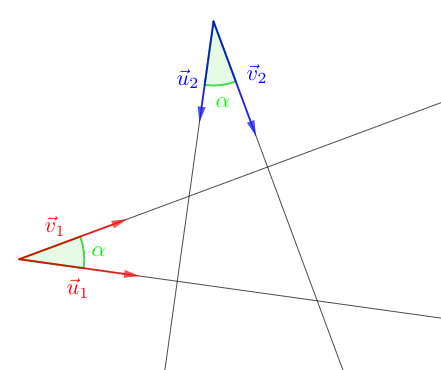
Soient $\vec{u}_{1}\;,\ \vec{u}_{2}\;,\ \vec{v}_{1}\;,\ \vec{v}_{2}\;$ quatre vecteurs tels que $\vec{u}_{1}\perp\vec{u}_{2}\;$ et $\;\vec{v}_{1}\perp\vec{v}_{2}\;$ alors : $$mes\;\widehat{(\vec{u}_{1}\;,\ \vec{v}_{1})}=mes\;\widehat{(\vec{u}_{2}\;,\ \vec{v}_{2})}$$
II. Mouvement sur un plan incliné
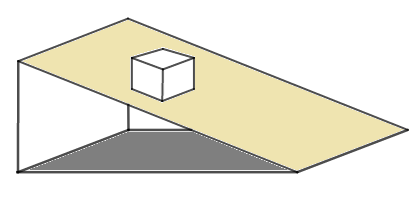
Illustration
Considérons une caisse de forme cubique, de masse $m$ et de centre de gravité $G$, glissant sur un plan incliné d'un angle $\alpha$ par rapport au plan horizontal.
Supposons qu'à l'instant $t_{0}=0\;;\ \vec{v}_{0}=\vec{0}.$
Déterminons alors l'accélération et la vitesse de cette caisse à un instant $t$ quelconque.
Étude du mouvement
$\centerdot\ \ $ Le système étudié est la caisse, considérée comme un solide ou un point matériel.
$\centerdot\ \ $ Le référentiel d'étude est le référentiel terrestre supposé galiléen.
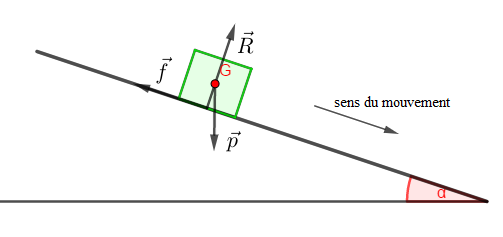
$\centerdot\ \ $ Les forces extérieures appliquées au système sont :
$-\ \ $ Le poids $\vec{p}$ ; force exercée par la terre sur la caisse.
$-\ \ $ La composante normale $\vec{R}$ de la réaction du plan incliné sur la caisse.
$-\ \ $ La force de frottement $\vec{f}$ toujours colinéaire et opposée au sens du mouvement.
$\centerdot\ \ $ Appliquons le théorème du centre d'inertie ou principe fondamental de la dynamique. On obtient alors : $$\sum \vec{F}_{\text{ext}}=m\vec{a}_{_{G}}=\vec{p}+\vec{f}+\vec{R}$$
$\centerdot\ \ $ Choisissons comme repère de projection un repère orthonormé $(O\;;\ \vec{i}\;,\ \vec{j})$ et supposons qu'à l'instant $t_{0}=0$, le centre d'inertie $G$ du solide, considéré comme un point matériel, se trouve à l'origine $O$ du repère.
$\centerdot\ \ $ Projetons la relation $\ \vec{p}+\vec{f}+\vec{R}=m\vec{a}_{_{G}}$ sur les axes du repère.
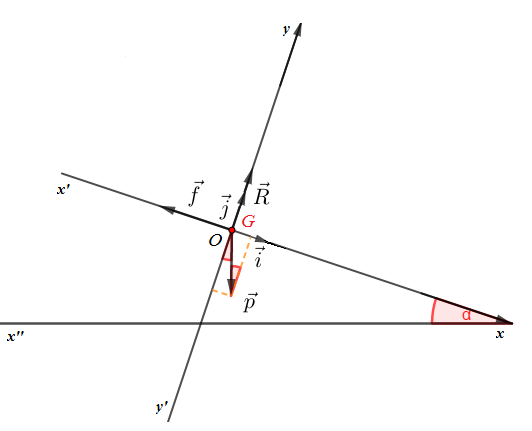
Les expressions des vecteurs $\vec{f}\;,\ \vec{R}\;,\ \vec{a}_{_{G}}$ et $\vec{p}$ dans la base $(\vec{i}\;,\ \vec{j})$ sont alors données par :
$$\vec{f}\left\lbrace\begin{array}{rcr} f_{x}&=&-f\\f_{y}&=&0\end{array}\right.\;,\quad\vec{R}\left\lbrace\begin{array}{rcr} R_{x}&=&0\\R_{y}&=&R\end{array}\right.\;,\quad\vec{a}_{_{G}}\left\lbrace\begin{array}{rcl} a_{_{G_{x}}}&=&a_{_{G}}\\a_{_{G_{y}}}&=&0\end{array}\right.$$
$$\vec{p}\left\lbrace\begin{array}{rcr} p_{x}&=&p\sin\alpha\\p_{y}&=&-p\cos\alpha\end{array}\right.$$
En effet, le poids $\vec{p}$ est orthogonal à l'axe $(xx'')$ de plus, l'axe $(Oy')$ est perpendiculaire à l'axe $(xx').$ Donc, en appliquant les propriétés géométriques ci-dessus, on obtient l'expression de $\vec{p}$ ainsi définie dans la base $(\vec{i}\;,\ \vec{j}).$
Et par conséquent, la (R.F.D) ; $\ \sum \vec{F}_{\text{ext}}=m\vec{a}_{_{G}}$ s'écrit alors : $$m\vec{a}_{_{G}}\left\lbrace\begin{array}{rcr} ma_{_{G_{x}}}&=&p\sin\alpha-f+0\\ma_{_{G_{y}}}&=&-p\cos\alpha+0+R\end{array}\right.$$
D'où ; $$\left\lbrace\begin{array}{ccr} ma_{_{G}}&=&p\sin\alpha-f\quad(1)\\0&=&-p\cos\alpha+R\quad(2)\end{array}\right.$$
De l'équation (1) on tire : $$\boxed{a_{_{G}}=\dfrac{p\sin\alpha-f}{m}}$$
La trajectoire étant une ligne droite et l'accélération $a_{_{G}}$ constante alors, le mouvement est rectiligne uniformément varié.
Donc, la vitesse $v_{_{G}}(t)$ à l'instant $t$ est donnée par : $$v_{_{G}}(t)=a_{_{G}}(t-t_{0})+v_{0}$$
Ainsi, en tenant compte des conditions initiales $(t_{0}=0\;,\ v_{0}=0)$ on obtient : $$\boxed{v_{_{G}}(t)=a_{_{G}}.t=\left(\dfrac{p\sin\alpha-f}{m}\right)t}$$
Commentaires
Mvoulatoumi Luther (non vérifié)
sam, 07/10/2021 - 13:08
Permalien
Pour faire un TP
Anonyme (non vérifié)
jeu, 10/21/2021 - 04:14
Permalien
Télécharger
Dominique (non vérifié)
mar, 08/16/2022 - 09:52
Permalien
Téléchargement de leçon physique chimie
Djamil (non vérifié)
lun, 12/25/2023 - 10:56
Permalien
Télécharger la leçon
Ajouter un commentaire