
Solution des exercices : Équilibre d'un solide mobile autour d'un axe - 2nd S
Classe:
Seconde
Exercice 1
Un chemin forestier est fermé par une barrière constituée d'une poutre (1) et d'un contre-poids (2).
La barrière peut tourner autour d'un axe $\Delta$ perpendiculaire en $O$ au plan de la figure
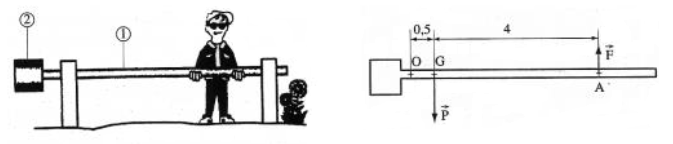
Les cotes sont en mètres. La masse de la barrière est $60\;kg\;;\ G$ est son centre de gravité.
Un promeneur veut la soulever en exerçant en $A$ une force $\vec{F}$ d'intensité $100\;N.$
1) a) Calculons l'intensité du poids $\vec{P}$ de la barrière.
Soit : $P=m.g\ $ avec, $g=10\;N.kg^{-1}.$
A.N : $P=60\times 10=600$
Donc, $\boxed{P=600\;N}$
b) Calculons le moment de $\vec{P}$ par rapport à $\Delta.$
On a : $\mathcal{M}_{\Delta}(\vec{P})=P\cdot OG$
A.N : $\mathcal{M}_{\Delta}(\vec{P})=600\times 0.5=300$
Ainsi, $\boxed{\mathcal{M}_{\Delta}(\vec{P})=300\;Nm}$
c) Calculons le moment de $\vec{F}$ par rapport à $\Delta.$
L'expression du moment de $\vec{F}$ par rapport à $\Delta$ est donnée par : $\mathcal{M}_{\Delta}(\vec{F})=P\cdot OA$
A.N : $\mathcal{M}_{\Delta}(\vec{F})=100\cdot 4=400$
D'où, $\boxed{\mathcal{M}_{\Delta}(\vec{F})=400\;Nm}$
2) Le promeneur peut soulever la barrière car $\mathcal{M}_{\Delta}(\vec{F})>\mathcal{M}_{\Delta}(\vec{P})$
Exercice 2
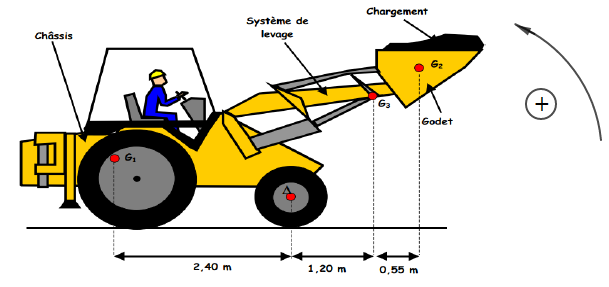
Le chargeur représenté ci-dessous se compose :
$-\ $ d'un châssis et du conducteur de masse $400\;kg$ ;
$-\ $ de son chargement de masse $420\;kg$ ;
$-\ $ d'un système de levage et du godet de masse $150\;kg.$
Le poids du châssis s'applique au point $G_{1}$
Le poids du chargement au poing $G_{2}$
Le poids du système de levage au poing $G_{3}$
1) Calculons les intensités des poids $P_{1}\;,\ P_{2}\ $ et $\ P_{3}$ du châssis, du chargement et du système de levage
Soit alors :
$P_{1}=m_{1}.g=400\times 10=40\cdot 10^{2}$
Donc, $\boxed{P_{1}=40\cdot 10^{2}\;N}$
$P_{2}=m_{2}.g=420\times 10=42\cdot 10^{2}$
Ainsi, $\boxed{P_{2}=42\cdot 10^{2}\;N}$
$P_{3}=m_{3}.g=150\times 10=15\cdot 10^{2}$
Par suite, $\boxed{P_{3}=15\cdot 10^{2}\;N}$
2) Calcul du moment du poids $P_{1}$ par rapport à l'axe $\Delta$ de la roue avant.
Choisissons un sens positif de rotation (voir figure)
Soit : $\mathcal{M}_{\Delta}(\vec{P}_{1})=P_{1}\cdot d_{1}$
A.N : $\mathcal{M}_{\Delta}(\vec{P}_{1})=40\cdot 10^{2}\cdot 2.40=96\cdot 10^{2}$
D'où, $\boxed{\mathcal{M}_{\Delta}(\vec{P}_{1})=96\cdot 10^{2}\;Nm}$
3) Calculons le moment du poids $P_{2}$ par rapport à l'axe $\Delta$ de la roue avant.
On a : $\mathcal{M}_{\Delta}(\vec{P}_{2})=-P_{2}\cdot d_{2}$
Donc, $\mathcal{M}_{\Delta}(\vec{P}_{2})=-42\cdot 10^{2}\cdot 1.75=-73.5\cdot 10^{2}$
Par suite, $\boxed{\mathcal{M}_{\Delta}(\vec{P}_{2})=-73.5\cdot 10^{2}\;Nm}$
4) Calcul du moment du poids $P_{3}$ par rapport à l'axe $\Delta$ de la roue avant.
Soit : $\mathcal{M}_{\Delta}(\vec{P}_{3})=-P_{3}\cdot d_{3}$
A.N : $\mathcal{M}_{\Delta}(\vec{P}_{3})=-15\cdot 10^{2}\cdot 1.20=-18\cdot 10^{2}$
D'où, $\boxed{\mathcal{M}_{\Delta}(\vec{P}_{3})=-18\cdot 10^{2}\;Nm}$
5) Vérifions si le chargeur ainsi chargé pivote autour de l'axe $\Delta$
On a :
$\begin{array}{rcl}\left|\mathcal{M}_{\Delta}(\vec{P}_{2})+\mathcal{M}_{\Delta}(\vec{P}_{3})\right|&=&\left|-73.5\cdot 10^{2}-18\cdot 10^{2}\right|\\ \\&=&91.5\end{array}$
Donc, $\left|\mathcal{M}_{\Delta}(\vec{P}_{2})+\mathcal{M}_{\Delta}(\vec{P}_{3})\right|=91.5\;Nm$
Comme $\mathcal{M}_{\Delta}(\vec{P}_{})=96\cdot 10^{2}\;Nm$ alors, $\mathcal{M}_{\Delta}(\vec{P}_{})>\left|\mathcal{M}_{\Delta}(\vec{P}_{2})+\mathcal{M}_{\Delta}(\vec{P}_{3})\right|$
Par conséquent, le chargeur ainsi chargé pivote autour de l'axe $\Delta.$
6) Déterminons la charge maximale que peut transporter le godet
Soit : $\mathcal{M}_{\Delta}(\vec{P}_{1})+\mathcal{M}_{\Delta}(\vec{P}_{2})+\mathcal{M}_{\Delta}(\vec{P}_{3})=0$ alors,
$\begin{array}{rcl}\mathcal{M}_{\Delta}(\vec{P}_{2})=-\mathcal{M}_{\Delta}(\vec{P}_{1})-\mathcal{M}_{\Delta}(\vec{P}_{3})&\Rightarrow&-P_{2}.d_{2}=-\mathcal{M}_{\Delta}(\vec{P}_{1})-\mathcal{M}_{\Delta}(\vec{P}_{3})\\ \\&\Rightarrow&P_{2}=\dfrac{\mathcal{M}_{\Delta}(\vec{P}_{1})+\mathcal{M}_{\Delta}(\vec{P}_{3})}{d_{2}}\\ \\&\Rightarrow&M_{2}.g=\dfrac{\mathcal{M}_{\Delta}(\vec{P}_{1})+\mathcal{M}_{\Delta}(\vec{P}_{3})}{d_{2}}\\ \\&\Rightarrow&M_{2}=\dfrac{\mathcal{M}_{\Delta}(\vec{P}_{1})+\mathcal{M}_{\Delta}(\vec{P}_{3})}{d_{2}.g}\end{array}$
Donc, $M_{2}=\dfrac{\mathcal{M}_{\Delta}(\vec{P}_{1})+\mathcal{M}_{\Delta}(\vec{P}_{3})}{d_{2}.g}$
A.N : $M_{2}=\dfrac{96\cdot 10^{2}-18\cdot 10^{2}}{1.75\times 10}=446$
D'où, $\boxed{M_{2}=446\;kg}$
Exercice 3
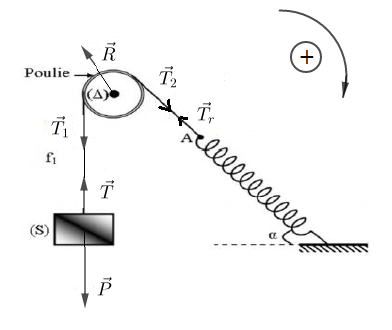
Un solide $(S)$ de masse $m=200\;g$ est relié à un fil de masse négligeable passant par la gorge d'une poulie à axe fixe $(\Delta)$, de masse négligeable et de rayon $r.$
L'autre extrémité du fil est attachée à un ressort de raideur $k$ et de masse négligeable.
A l'équilibre, l'axe du ressort fait un angle $\alpha=30^{\circ}$ avec l'horizontale et le ressort est allongé de $\Delta l=4\;cm.$ On néglige tout type de frottement.
1) a) Représentons les forces exercées sur le solide $(S).$
b) Écrivons la condition d'équilibre de $(S)$
$$\vec{P}+\vec{T}=\vec{0}$$
Déterminons l'expression de la tension du fil $f_{1}.$
On a :
$\begin{array}{rcl}\vec{P}+\vec{T}=\vec{0}&\Rightarrow&m.g-T=0\\ \\&\Rightarrow&T=m.g\end{array}$
Calcul de sa valeur.
$T=m.g=200.10^{-3}\times 10=2$
Donc, $\boxed{T=2\;N}$
2) a) Représentons les forces exercées sur la poulie.
Voir figure
b) Détermination de la tension du fil $f_{2}$
Le théorème des moments s'écrit :
$\begin{array}{rcl} M_{\Delta}(\vec{T_{1}})+M_{\Delta}(\vec{T_{2}})+M_{\Delta}(\vec{R})=0&\Rightarrow&-T_{1}r+T_{2}r+0=0\\ \\&\Rightarrow&T_{2}r=T_{1}r\\ \\&\Rightarrow&T_{2}=T_{1}\end{array}$
Le fil transmet les forces donc :
$\begin{array}{rcl} T_{1}=T&\Rightarrow&T_{2}=T\\ \\&\Rightarrow& T_{2}=2\;N\end{array}$
c) Déduction de la tension du fil $f_{2}$ au point $A.$
Le fil transmet les forces alors :
$$T_{r}=T_{2}\ \Rightarrow\ T_{r}=2\;N$$
3) Déterminons la valeur de la raideur du ressort $k.$
On a : $T_{r}=k\Delta l\ \Rightarrow\ k=\dfrac{T_{r}}{\Delta l}$
A.N : $k=\dfrac{2.0}{4.10^{-2}}=25$
Ainsi, $\boxed{k=25\;N.m^{-1}}$
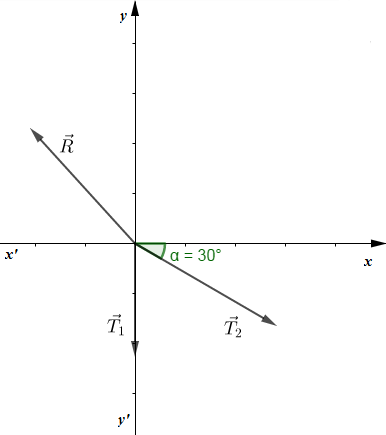
4) Par projection de la relation vectorielle, traduisant l'équilibre de la poulie, dans un repère orthonormé, montrons que la valeur de la réaction R de l'axe $(\Delta)$ est $R=mg\sqrt{2(1+\sin \alpha)}$
La condition d'équilibre s'écrit :
$$\vec{T_{1}}+\vec{T_{2}}+\vec{R}=\vec{0}$$
En projetant la relation vectorielle suivant les axes $x’x\ $ et $\ y’y$, il vient :
$0+T_{2}\cos \alpha-R_{x}=0\ \Rightarrow\ R_{x}=T_{2}\cos \alpha=mg\cos \alpha$
$\begin{array}{rcl} T_{1}+T_{2}\sin \alpha-R_{y}=0&\Rightarrow&R_{y}=T_{1}+T_{2}\sin \alpha\quad\text{or, }\ T_{1}=T_{2}=mg\\ \\&\Rightarrow&R_{y}=mg(1+\sin \alpha)\end{array}$
Soit alors :
$\begin{array}{rcl} R&=&\sqrt{R_{x}^{2}+R_{y}^{2}}\\ \\&=&\sqrt{(m.g\cos \alpha)^{2}+(m.g(1+\sin \alpha))^{2}}\\ \\&=&m.g\sqrt{(\cos \alpha)^{2}+(1+\sin \alpha)^{2}}\\ \\&=&m.g\sqrt{\cos^{2}\alpha+1+2\sin \alpha+\sin^{2}\alpha}\\ \\&=&m.g\sqrt{2+2\sin \alpha}\\ \\&=&m.g\sqrt{2(1+\sin \alpha)}\end{array}$
Calcul de sa valeur
$\begin{array}{rcl} R&=&m.g\sqrt{2(1+\sin \alpha)}\\ \\&=&200.10^{-3}\times 10\sqrt{2(1+\sin 30^{\circ})}\\ \\&=&0.34\end{array}$
D'où, $\boxed{R=0.34\;N}$
Exercice 4
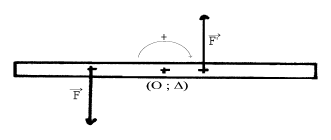
On dispose d'une règle homogène, de masse négligeable, pouvant tourner autour d'un axe horizontal $\Delta$ passant par son centre d'inertie $O.$ On veut connaître le comportement de la règle dans les situations suivantes :
1) La règle, initialement au repos, est soumise à un seul couple de forces $(\vec{F}\;,\ \vec{F'})\ :$, indiquons quel est le comportement de la règle et donnons le signe du moment du couple de forces.
Le couple de forces fait tourner la règle dans un sens opposé à celui du sens positif choisi. Le signe du moment du couple est donc négatif.
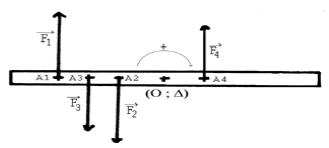
2.1) Calcul du moment de chaque couple.
Soit : $F_{1}=F_{2}=2.5\times 2\ \Rightarrow\ F_{1}=F_{2}=5\;N$
$d=1.6\times 10\ \Rightarrow\ d=16\;cm$
$F_{3}=F_{4}=2\times 2\ \Rightarrow\ F_{3}=F_{4}=4\;N$
$d'=3.0\times 10\ \Rightarrow\ d'=30\;cm$
Alors,
$M_{\Delta}(F_{1}\;,\ F_{2})=F_{1}.d=5\times 16.10^{-2}$
Donc, $\boxed{M_{\Delta}(F_{1}\;,\ F_{2})=0.80\;Nm}$
$M_{\Delta}(F_{1}\;,\ F_{2})=F_{1}.d=5\times 16.10^{-2}$
Ainsi, $\boxed{M_{\Delta}(F_{1}\;,\ F_{2})=0.80\;Nm}$
$M_{\Delta}(F_{3}\;,\ F_{4})=-F_{3}.d'=4\times 30.10^{-2}$
D'où, $\boxed{M_{\Delta}(F_{3}\;,\ F_{4})=-1.20\;Nm}$
2.2) Exprimons la condition d'équilibre de la règle.
$$M_{\Delta}(F_{1}\;,\ F_{2})+M_{\Delta}(F_{3}\;,\ F_{4})=0$$
Montrons alors que la règle n'est pas en équilibre mais en rotation non uniforme.
On a :
$$\left|M_{\Delta}(F_{3}\;,\ F_{4})\right|>M_{\Delta}(F_{1}\;,\ F_{2})$$
Donc, la règle n'est pas équilibre mais en rotation non uniforme.
Cette rotation se fait dans le sens négatif.
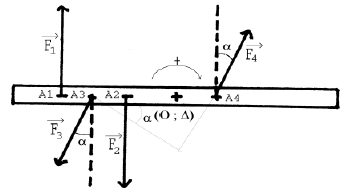
2.3) On veut obtenir l'équilibre de cette règle :
2.3.1) Pour cela, on déplace le point d'application $A_{3}$ de la force $\vec{F}_{3}$, déterminons la position de $A_{3}$ par rapport à $O$ pour que la règle soit en équilibre.
On sait que : $M_{\Delta}(F_{1}\;,\ F_{2})+M_{\Delta}(F_{3}\;,\ F_{4})=0$
Donc,
$\begin{array}{rcl} M_{\Delta}(F_{3}\;,\ F_{4})=-M_{\Delta}(F_{1}\;,\ F_{2})&\Rightarrow&-F_{3}.d=-M_{\Delta}(F_{1}\;,\ F_{2})\\ \\&\Rightarrow&d=\dfrac{M_{\Delta}(F_{1}\;,\ F_{2})}{F_{3}}\\ \\&\Rightarrow&d=\dfrac{0.80}{4}\\ \\&\Rightarrow&d=0.20\;m\end{array}$
2.3.2) Donnons l'expression du moment du couple $(\vec{F_{3}}\;,\ \vec{F_{4}})$ en fonction de $\alpha\;,\ F_{3}\;,\ A_{3}A_{4}$
On a :
$$M_{\Delta}(F_{3}\;,\ F_{4})=-F_{3}.A_{3}A_{4}.\cos\alpha$$
Détermination de la valeur de $\alpha$ pour laquelle la règle est en équilibre.
On a : $M_{\Delta}(F_{1}\;,\ F_{2})+M_{\Delta}(F_{3}\;,\ F_{4})=0\ \Rightarrow\ M_{\Delta}(F_{3}\;,\ F_{4})=-M_{\Delta}(F_{1}\;,\ F_{2})$
Alors,
$\begin{array}{rcl} -F_{3}.A_{3}A_{4}.\cos\alpha=-M_{\Delta}(F_{1}\;,\ F_{2})&\Rightarrow&\cos\alpha=\dfrac{M_{\Delta}(F_{1}\;,\ F_{2})}{F_{3}.A_{3}A_{4}}\\ \\&\Rightarrow&\alpha=\cos^{-1}\left(\dfrac{(M_{\Delta}(F_{1}\;,\ F_{2})}{F_{3}.A_{3}A_{4}}\right)\\ \\&\Rightarrow&\alpha=\cos^{-1}\left(\dfrac{0.80}{4\times 0.30}\right)\\ \\&\Rightarrow&\alpha=48.2^{\circ}\end{array}$
Donc, $\boxed{\alpha=48.2^{\circ}}$
Commentaires
Imourana (non vérifié)
mar, 08/25/2020 - 03:36
Permalien
Perfectionnement
Camara (non vérifié)
lun, 04/08/2024 - 14:25
Permalien
Comprendre
Cheikh Ahmed Ti... (non vérifié)
mar, 05/20/2025 - 21:26
Permalien
Devenir excellent
Anonyme (non vérifié)
ven, 01/15/2021 - 18:59
Permalien
Télécharger
Ly (non vérifié)
dim, 05/02/2021 - 07:52
Permalien
Entraînement
Cheikh Gueye (non vérifié)
lun, 04/14/2025 - 22:18
Permalien
Scientifique
Bayla (non vérifié)
ven, 05/21/2021 - 09:49
Permalien
Exercice
Antika (non vérifié)
mer, 07/06/2022 - 21:17
Permalien
Réviser
Boudah (non vérifié)
sam, 11/25/2023 - 10:12
Permalien
Correction de la série d'exercices équilibre d'un solide mobile
Cheikh Ahmed Ti... (non vérifié)
mar, 05/20/2025 - 21:28
Permalien
Correction de la série équilibre autour d'un axe
Diakhaté (non vérifié)
ven, 06/21/2024 - 02:52
Permalien
Pc
Sidi Abdella (non vérifié)
sam, 02/01/2025 - 21:07
Permalien
Corrections d'exercices
Sidi Abdella (non vérifié)
sam, 02/01/2025 - 20:57
Permalien
Correction
Ziba Balibio (non vérifié)
mer, 02/10/2021 - 12:09
Permalien
téléchargement
Koné Jacob (non vérifié)
mer, 02/10/2021 - 16:03
Permalien
Tige
Fabourama (non vérifié)
dim, 06/06/2021 - 03:25
Permalien
Correction
Gggg (non vérifié)
mar, 04/12/2022 - 01:44
Permalien
Rrrr
Abdoulaye mbodj (non vérifié)
mer, 05/25/2022 - 16:12
Permalien
Eleve
Anonyme (non vérifié)
lun, 06/27/2022 - 20:24
Permalien
Génial
Ousmane Diallo (non vérifié)
lun, 04/29/2024 - 18:57
Permalien
Être un geni
Isaac (non vérifié)
mar, 11/23/2021 - 01:06
Permalien
Pour ma réussite scolaire
Babou Cissé (non vérifié)
lun, 05/30/2022 - 22:50
Permalien
Demande d'exercice su moment
DIALLO (non vérifié)
mar, 02/15/2022 - 00:38
Permalien
Exercice
Anonyme (non vérifié)
mar, 04/23/2024 - 00:16
Permalien
Merci beaucoup vraiment les
Moncif (non vérifié)
dim, 03/06/2022 - 14:24
Permalien
Je veux la correction de
Moctar dramé (non vérifié)
sam, 06/18/2022 - 22:52
Permalien
Sciences physiques
Mok (non vérifié)
dim, 03/06/2022 - 14:26
Permalien
Lhwa
Gggg (non vérifié)
jeu, 04/14/2022 - 00:51
Permalien
Layne3lk nta nit
Diop (non vérifié)
mer, 04/20/2022 - 22:31
Permalien
Svp le reste de la correction
Sagna (non vérifié)
ven, 05/13/2022 - 21:12
Permalien
Perfection
Pape M beye (non vérifié)
dim, 06/05/2022 - 19:51
Permalien
plus de correction
Anonyme (non vérifié)
lun, 06/27/2022 - 21:33
Permalien
corigé svp
Medn (non vérifié)
dim, 01/29/2023 - 22:28
Permalien
Exo 9
Elhadji siaka y... (non vérifié)
lun, 04/01/2024 - 12:08
Permalien
Eleve
Arame (non vérifié)
dim, 05/07/2023 - 23:35
Permalien
Éléve
Fayole (non vérifié)
dim, 05/14/2023 - 14:53
Permalien
Correction de exo 7
Aya lemyasser (non vérifié)
sam, 03/23/2024 - 22:04
Permalien
Aya
Aya lemyasser (non vérifié)
sam, 03/23/2024 - 22:05
Permalien
Aya
Seydina SEYDI (non vérifié)
ven, 05/09/2025 - 10:53
Permalien
Correction de lexo7
David (non vérifié)
lun, 05/15/2023 - 01:47
Permalien
Devenir plus fort
Sokhou98 (non vérifié)
mar, 05/16/2023 - 22:16
Permalien
Devenir plus fort
Mame Henriette ... (non vérifié)
dim, 05/21/2023 - 16:13
Permalien
J.aime bien sa nous aide
Soulèymane kandé (non vérifié)
jeu, 06/15/2023 - 19:18
Permalien
Scientifique
Anonyme (non vérifié)
jeu, 01/25/2024 - 20:11
Permalien
C’est bien
Anonyme (non vérifié)
ven, 03/29/2024 - 15:37
Permalien
Il n'y a pas la correction de
Nadi (non vérifié)
mar, 04/23/2024 - 16:49
Permalien
S'ils vous plaît je voudrais
Anonyme (non vérifié)
jeu, 05/23/2024 - 22:35
Permalien
Merci
Yama (non vérifié)
jeu, 05/23/2024 - 22:36
Permalien
Ediquer
Anonyme (non vérifié)
jeu, 05/23/2024 - 22:44
Permalien
Correction de la série
Khady Ndoye (non vérifié)
ven, 05/31/2024 - 00:14
Permalien
Réussir
Pages
Ajouter un commentaire