
Géométrie dans l'espace - T S1
I Détermination de droites et de plans
$-\ $ un point et une droite
$-\ $ l'intersection de deux plans
$-\ $ un système paramétrique
Exemple
On a : $\overrightarrow{AB}\begin{pmatrix}-5\\ -1\\2\end{pmatrix}$. Soit $M\begin{pmatrix}x\\y\\z\end{pmatrix}\in (AB)$ alors, $\overrightarrow{AM}$ colinéaire à $\overrightarrow{AB}$.
x-1 &=& -5k\\
y-2 &=& -k\\
z-3 &=& 2k
\end{array} \right. \text{ Ainsi, } \left\lbrace\begin{array} {lcl}
x &=& -5k+1\\
y &=& -k+2\\
z &=& 2k+3
\end{array}\right.$ est l'équation paramétrique de $(AB)$.
x-5y+9 &=& 0\\
2y+z-7 &=& 0
\end{array}\right.$qui constitue une équation cartésienne de $(AB)$.
$-\ $ trois points non alignés
$-\ $ un point $A$ et une droite qui lui est perpendiculaire ou un plan qui lui est parallèle.
$-\ $ deux droites strictement parallèles ou sécantes
$-\ $ une droite et un point extérieur à cette droite
$-\ $ une équation cartésienne du type $ax+by+cz+d=0$ avec $a$, $b$ et $c$ non tous nuls
$-\ $ une représentation paramétrique
Exemple
1\\
2\\
3
\end{pmatrix}$, $\ B\begin{pmatrix}
-1\\
2\\
5
\end{pmatrix}$ et $C\begin{pmatrix}
2\\
3\\
4
\end{pmatrix}$ trois points de l'espace.
x\\
y\\
z
\end{pmatrix}\in$ au plan $(ABC)$ si, et seulement si, il existe $k$ et $k'$ $\in\mathbf{R}^{*}$ tels que $$\overrightarrow{AM}=k\overrightarrow{AB}+k'\overrightarrow{AC}$$
x &=& -2k+k'+1\\
y &=& k'+2\\
z &=& 2k+k'+3
\end{array}
\right.$
Remarques
a\\
b\\
c
\end{pmatrix}$ est un vecteur normal à $(\mathcal{P}).$
II Positions relatives de droites et de plans
$\centerdot\ \ $ Une droite $\Delta$ et un plan de l'espace sont :
$-\ $ soit sécants en un point $A$, et on dit que la droite perce le plan
$-\ $ soit la droite est parallèle au plan ($\Delta\cap\mathcal{P}=\emptyset$ ou $\Delta\subset\mathcal{P}$)
$\centerdot\ \ $ Deux plans $\mathcal{P}$ et $\mathcal{P}'$ de l'espace sont soit parallèles $\mathcal{P}=\mathcal{P}'$ ou $\mathcal{P}\cap\mathcal{P}'=\emptyset$, soit sécants $\mathcal{P}\cap\mathcal{P}'=\Delta$
III Parallélisme et orthogonalité dans l'espace
$\centerdot\ \ $ Une droite $\Delta$ et un plan $\mathcal{P}$ sont parallèles si ($\Delta\cap\mathcal{P}=\emptyset$ ou $\Delta\subset\mathcal{P}$)
$\centerdot\ \ $ Deux plans $\mathcal{P}$ et $\mathcal{P}'$ sont parallèles si $\mathcal{P}=\mathcal{P}'$ ou $\mathcal{P}\cap\mathcal{P}'=\emptyset$. Les vecteurs normaux $\vec{n}$ et $\vec{n}'$ sont colinéaires
$\centerdot\ \ $ Deux droites $\Delta$ et $\Delta'$ sont perpendiculaires
$-\ $ si l'une parallèle à un plan perpendiculaire à l'autre
$-\ $ et si en un point quelconque de l'espace elles sont perpendiculaires.
$\centerdot\ \ $ Une droite $\Delta$ et un plan $\mathcal{P}$ sont perpendiculaires
$-\ $ si $\Delta$ est perpendiculaire à deux droites sécantes de $\mathcal{P}$
$-\ $ si $\Delta$ est perpendiculaire à toute droite $D\subset\mathcal{P}$
$-\ $ si le vecteur directeur de $\Delta$ et $\vec{n}$ sont colinéaires.
$\centerdot\ \ $ Deux plans $\mathcal{P}$ et $\mathcal{P}'$ sont perpendiculaires
$-\ $ si l'un des plans contient une droite perpendiculaire à l'autre plan
$-\ $ si $\vec{n}$ orthogonal à $\vec{n}'$
IV Produit vectoriel
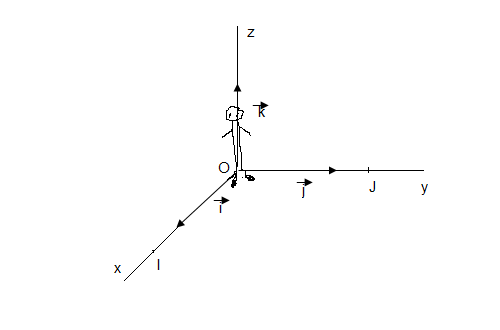
IV.1 Orientations dans l'espace
IV.2 Définitions
$-\ $ égal au vecteur nul si $\vec{u}$ et $\vec{v}$ sont colinéaires
IV.3 Propriétés
IV.4 Expression dans une base orthonormée
x\\
y\\
z
\end{pmatrix}$ et $\vec{v}\begin{pmatrix}
x'\\
y'\\
z'
\end{pmatrix}$ deux vecteurs de l'espace. $\vec{i}$, $\ \vec{j}$ et $\vec{k}$ vecteurs unitaires du repère direct tels que $$\vec{i}\wedge\vec{j}=\vec{k}\;,\quad\vec{j}\wedge\vec{k}=\vec{i}\quad\text{et}\quad\vec{k}\wedge\vec{i}=\vec{j}$$
Soient $\vec{u}=x\vec{i}+y\vec{j}+z\vec{k}$ et $\vec{u}=x'\vec{i}+y'\vec{j}+z'\vec{k}$
On a : \begin{eqnarray}\vec{u}\wedge\vec{v}&=&(x\vec{i}+y\vec{j}+z\vec{k})\wedge(x'\vec{i}+y'\vec{j}+z'\vec{k})\nonumber\\ \\ \\&=&xy'\vec{k}-xz'\vec{j}-yx\vec{k}+yz'\vec{i}+zx'\vec{j}-zy'\vec{i} \nonumber\\ \\ \\&=&(yz'-zy')\vec{i}-(xz'-zx')\vec{j}+(xy'-yx')\vec{k} \nonumber\\ \\ \\&=&\vec{i}\begin{vmatrix} y&y'\\ z&z'\end{vmatrix}-\vec{j}\begin{vmatrix} x&x'\\ z&z'\end{vmatrix}+\vec{k}\begin{vmatrix} x&x'\\ y&y'\end{vmatrix} \nonumber \end{eqnarray}
IV.5 Applications
IV.5.1 Aire d'un triangle - aire d'un parallélogramme
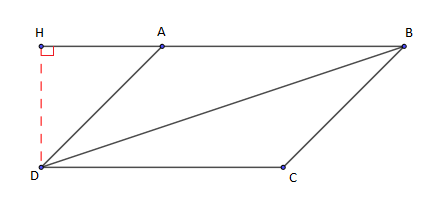
$\mathcal{A}_{ABD}=\dfrac{AB\times AH}{2}$ avec $H$ le projeté orthogonal de $D$ sur $(AB)$.
On a : \begin{eqnarray} AH&=&AD\times|\sin(\pi-(\overrightarrow{AB}\;,\ \overrightarrow{AD}))| \nonumber\\ \\ &=&AD\times|\sin(\overrightarrow{AB}\;,\ \overrightarrow{AD})| \nonumber \end{eqnarray}
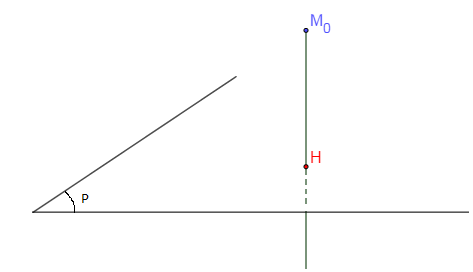
IV.5.2 Distance d'un point à un plan
x_{0}\\
y_{0}\\
z_{0}
\end{pmatrix}\notin\mathcal{P}$.
Soit $H$ le projeté orthogonal de $M_{0}$ sur le plan $\mathcal{P}$. On note par $d(M_{0},\ \mathcal{P})$ la distance entre le point $M_{0}$ et le plan $\mathcal{P}$.
On a : $d(M_{0}\;,\ \mathcal{P})=M_{0}H$ or $\overrightarrow{M_{0}H}$ est colinéaire à $\vec{n}\begin{pmatrix} a \\ b \\ c \end{pmatrix}$, vecteur normal à $\mathcal{P}.$
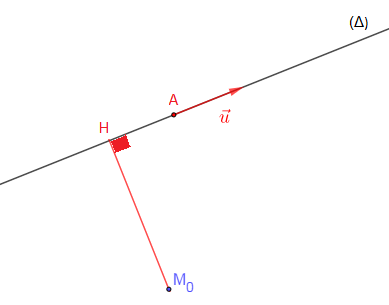
IV.5.3 Distance d'un point à une droite
Notons $d(M_{0}\;,\ \Delta)$ la distance entre $M_{0}$ et la droite $\Delta.$
\begin{eqnarray}\overrightarrow{M_{0}A}\wedge\vec{u}&=&(\overrightarrow{M_{0}H}+\overrightarrow{HA})\wedge\vec{u}\nonumber\\ \\ &=&\overrightarrow{M_{0}H}\wedge\vec{u}+\underbrace{\overrightarrow{HA}\wedge\vec{u}}_{\vec{0}}\;,\quad\text{car }\overrightarrow{HA}\text{ colinéaire à }\vec{u}\nonumber\\ \\ &=&\overrightarrow{M_{0}H}\wedge\vec{u}\nonumber\\ \\ \Rightarrow\ ||\overrightarrow{M_{0}A}\wedge\vec{u}||&=&||\overrightarrow{M_{0}H}\wedge\vec{u}||\ =\ ||\overrightarrow{ M_{0}H}||\times||\vec{u}||\times\sin\dfrac{\pi}{2}\nonumber \\ \\&=&M_{0}H\times||\vec{u}||\nonumber\\ \\ \Rightarrow\ M_{0}H&=&\dfrac{||\overrightarrow{M_{0}A}\wedge\vec{u}||}{||\vec{u}||}\nonumber \end{eqnarray}
Commentaires
Dįãllõ (non vérifié)
dim, 05/21/2023 - 03:40
Permalien
Oumar
Ajouter un commentaire