I. Masse d'un corps
1. Observations
Soit, par exemple, un sac rempli de riz : on dit que ce sac contient une certaine quantité de riz ou encore une certaine masse de riz.
Considérons maintenant un sac $A$ de riz et un sac $B$ de riz : on dit que le sac $A$ contient une quantité de riz qui est importante de celle qui est contenue dans le sac $B$ ou bien qu'il contient une masse plus grande de celle contenue dans le sac rempli à demi.
2. Définition
La masse d'un corps est une grandeur physique représentant la quantité de matière contenue dans ce corps.
3. Caractéristiques de la masse d'un corps
La masse d'un corps est une grandeur scalaire positive, extensive, invariable, et indépendante du lieu.
4. Mesures et unités
4.1. Mesures
4.1.1. Appareil de mesure
La masse d'un corps est mesurée à l'aide d'une balance.
Exemples de balance
Balance Roberval
Balance monoplateau
Balance médicale
4.1.2. Types de mesure
4.1.2.1. Mesure par la simple pesée
La simple est réalisée lorsqu'une grande pesée n'est pas nécessaire
On utilise, par exemple une balance de Roberval.
Sur l'un des plateaux, on place l'objet dont on veut mesurer sa masse et on met sur l'autre plateau des masses marquées jusqu'à ce que la balance soit équilibrée.
4.1.2.2. Mesure par la double pesée
La double pesée permet de mesurer des masses même si la balance utilisée n'est pas juste.
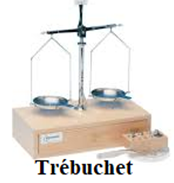
On utilise, une balance précise, par exemple, un trébuchet.
Pour peser l'objet dont on cherche la masse $m$, on effectue deux pesées avec la même tare $T$ (double pesée à tare constante).
La tare est un objet quelconque, par exemple une masse marquée dont la masse est supérieure à la masse $m$ à mesurer.
Première pesée : la tare est placée dans l'un des plateaux, l'objet à peser $($masse $m)$ dans l'autre plateau et on équilibre la balance au zéro avec des masses marquées $(m_{1})$ à côté de l'objet dont on cherche la masse
Deuxième pesée : on conserve la tare et on équilibre la balance au zéro en plaçant des masses marquées dans le plateau contenant l'objet après avoir vidé de son contenu
La valeur cherchée $m$ s'obtient par la relation :
$$m+m_{1}=m_{2}\Leftrightarrow\boxed{m=m_{2}-m_{1}}$$
4.2. Unité de la masse
L'unité de masse dans le Système International $(S.I)$ est le kilogramme $($symbole : $kg)$
On utilise également les multiples et les sous-multiples du kilogramme
$$\begin{array}{|l|l|l|l|} \hline &\text{Unité et symbole}&\text{Valeur}&\text{Valeur}\\ & &\text{en kilogramme}&\text{en gramme}\\\hline &\text{La tonne }(t)&10^{3}kg&10^{6}g\\ \text{Multiples}&\text{Le quintal }(q)&10^{2}kg&10^{5}g\\ &\text{Dizaine du kilogramme }(10)&10^{1}kg&10^{4}g\\ \hline &\text{Hectogramme }(hg)&10^{-1}kg&10^{3}g\\ &\text{Décagramme }(dag)&10^{-2}kg&10^{2}g\\ &\text{Gramme }(g)&10^{-3}kg&1g\\ \text{Sous-multiples}&\text{Décigramme }(dg)&10^{-4}kg&10^{-1}g\\ &\text{Centigramme }(cg)&10^{-5}kg&10^{-2}g\\ &\text{Miligramme }(mg)&10^{-6}kg&10^{-3}g\\ &\text{Microgramme }(\mu)&10^{-9}kg&10^{-6}g\\ &\text{Nanogramme }(n)&10^{-12}kg&10^{-9}g\\ \hline \end{array}$$
Quelques ordres de grandeurs de masses quelques corps ou particules.
masse du proton : $m_{p}=1.672\cdot10^{-27}kg$ ;
masse du neutron : $m_{n}=1.674\cdot10^{-27}kg$ ;
masse de la Terre : $m_{T}=6\cdot10^{24}kg$ ;
masse du Soleil : $m_{S}=2\cdot10^{30}kg$
Définition du kilogramme
Le kilogramme est la masse de l'objet dénommé kilogramme-étalon et conservé au Pavillon de Breteuil à Sèvres
II. Masse volumique et densité d'un corps
1. Masse volumique d'un corps
Des corps ayant le même volume ont généralement des masses différentes.
Pour caractériser un corps, on peut utiliser une grandeur physique appelée masse volumique.
1.1. Définition
La masse volumique d'un corps, à température donnée, est la masse de l'unité de volume de ce corps à cette température.
Remarque :
La masse volumique d'une substance dépend des conditions dans lesquelles elle se trouve, elle varie en fonction de la température et de la pression, surtout pour les gaz, mais aussi pour les liquides et les solides.
1.2. Unités de la masse volumique
La masse volumique s'exprime, dans le Système International, en kilogrammes par mètre cube $($symbole : $kg\cdot m^{-3})$
Les unités usuelles sont :
le gramme par centimètre cube $(g\cdot cm^{-3})$ ; le kilogramme par décimètre cube $(kg\cdot dm^{-3})$ ; la tonne par mètre cube $(t\cdot m^{-3})$
Remarque :
$-\ $ Le kilogramme par litre $(kg/L)$, le gramme par millilitre $(g/mL)$, le kilogramme par décimètre cube $(kg/dm^{3})$ et le gramme par centimètre cube $(g/cm^{3})$ sont équivalents :
$$1kg/L=1g/L=1kg/dm^{3}=1g/cm^{3}$$
$-\ $ Le gramme par litre $(g/L)$, le milligramme par millilitre $(mg/mL)$, gramme par décimètre cube $(kg/dm^{3})$ et le milligramme par centimètre cube $(g/cm^{3})$ sont équivalents :
$$1g/L=1mg/mL=1g/dm^{3}=1mg/cm^{3}$$
1.3. Mesure de la masse volumique d'un corps
Pour déterminer la masse volumique d'une substance, il faut en mesurer la masse d'un volume donné.
Si le corps a une forme géométrique simple, la mesure des dimensions et un calcul permettent d'obtenir son volume.
Sinon, la méthode est à adapter à la nature de la substance et à son état physique.
Pour mesurer la masse, on utilise une balance et des masses marquées.
1.3.1. Masse volumique d'un solide
$\blacktriangleright\ $Pour un solide à forme géométrique simple on détermine :
$-\ $ sa masse par pesée : simple ou double
$-\ $ son volume calculé à partir des dimensions :
par exemple : $V=\pi R^{2}h\quad \text{(cylindre)}$
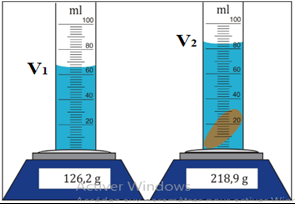
$\blacktriangleright\ $Solide à forme géométrique quelconque :
$-\ $La masse est déterminée par pesée : simple ou double.
$-\ $Le volume est déterminé par immersion : $V=V_{2}-V_{1}$
On détermine la masse volumique du solide par la relation :
$$\rho=\dfrac{m}{V}$$
1.3.2. Masse volumique de liquide
La masse de liquide se détermine par double-pesée avec une balance et le volume peut se lire avec une fiole jaugée
La masse volumique du liquide est déterminée par la relation :
$$\rho=\dfrac{m_{2}-m_{1}}{V}$$
Première pesée
Deuxième pesée
1.3.3. Masse volumique des gaz
Tout comme pour les liquides et les solides, il est possible de calculer la masse volumique d'un gaz en divisant la mesure de sa masse par celle de son volume.
$$\rho=\dfrac{m}{V}$$
1.3.4. Masse volumique de quelques substances
$$\begin{array}{|l|l|l|l|l|l|l|l|} \hline \text{Métal}&\text{Aluminium}&\text{Argent}&\text{Laiton (alliage)}&\text{Cuivre}&\text{Fer}&\text{Plomb}&\text{Or}\\ \hline \rho\text{ en }g\cdot cm^{-3}&2.7&10.5&7.3\;-\;8.4&8.9&7.9&11.4&19.3\\\hline \end{array}$$
2. Densité d'un corps
2.1.Observations
Un glaçon flotte sur l'eau, un tronc d'arbre flotte sur la rivière.
Au contraire une roche, un morceau de fer, une bille de plomb tombent au fond de l'eau.
Celles qui coulent ont une masse volumique plus grande que la masse volumique de l'eau.
Au contraire, les substances qui flottent ont une masse volumique plus petite que celle de l'eau.
Comparer la masse volumique d'une substance à celle de l'eau permet donc de faire des prévisions pour savoir si la substance flotte ou non.
Il est pratique d'introduire une notion : la densité.
2.2 .Définition
$\blacktriangleright\ $La densité d'un corps est le rapport de la masse de ce corps à la masse d'un égal volume d'un corps pris comme référence pris à la même température
$$d=\dfrac{m}{m_{ref}}$$
Comme $m=\rho V\text{ et }m_{ref}=\rho_{ref}V$
$\blacktriangleright\ $La densité d'un corps est le rapport de sa masse volumique à la masse volumique d'un corps pris comme référence
$$d=\dfrac{\rho}{\rho_{ref}}$$
$-\ $ Pour les solides et les liquides, le corps de référence est l'eau :
$$d=\dfrac{\rho}{\rho_{eau}}$$
$-\ $ Pour les gaz, le corps de référence est l'air :
$$d=\dfrac{\rho}{\rho_{air}}$$
2.3. Densité de quelques substances
Le tableau ci-dessous résume la densité de quelques substances
$$\begin{array}{|l|l|l|l|l|l|l|} \hline \text{Substance}&\text{Fer}&\text{Aluminium}&\text{Cuivre}&\text{Ethanol}&\text{Caoutchouc}&\text{Glace}\\ \hline \text{Densité}&7.86&2.7&8.92&0.798&0.92\text{ à }0.99&0.917\\ \hline \end{array}$$
L'acier a une densité de l'ordre de celle du fer suivant sa composition.
Remarque :
Un corps flotte dans l'eau lorsque la densité est inférieure à $1$ et coule lorsque la densité est supérieure à $1$
III. Le poids d'un corps
1. Observations
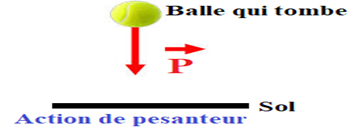
Un objet lâché sans vitesse initiale tombe et se dirige vers la Terre.
Une balle lancée verticalement vers le haut atteint une hauteur limite puis retombe.
Un projectile lancé de façon quelconque décrit une trajectoire courbe et finit par atteindre le sol.
Ces observations montrent que la Terre exerce une force sur tout objet placé dans son environnement immédiat.
2. Définition
Le poids d'un corps est la force d'attraction que la Terre exerce sur ce corps.
3. Caractéristiques du poids
Les caractéristiques du poids d'un corps sont :
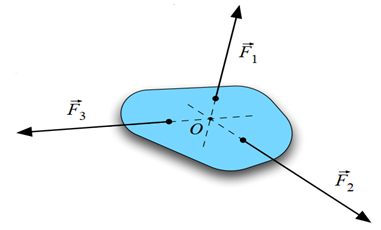
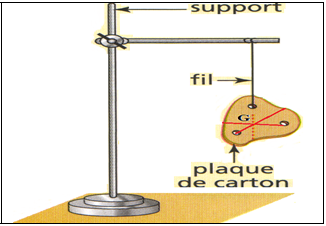
$-\ $ Son point d'application
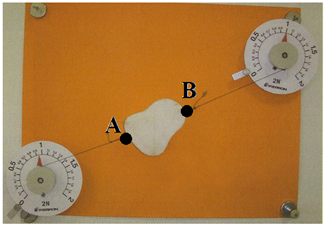
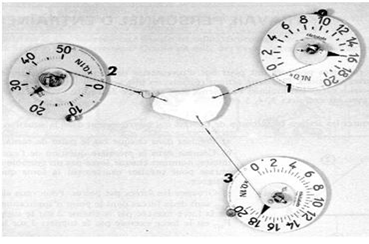
Son point d'application est le centre de gravité $G.$
Toutes les verticales passant par un point quelconque de suspension $S$ du corps concourent en point G appelé centre de gravité.
Le point $G$ dépend de la répartition de la matière dans le volume de l'objet
$-\ $ Sa direction
La verticale du lieu où se trouve le corps
$-\ $ Son sens
Le sens est du haut vers le bas
$-\ $ Son intensité
C'est sa grandeur poids $P$
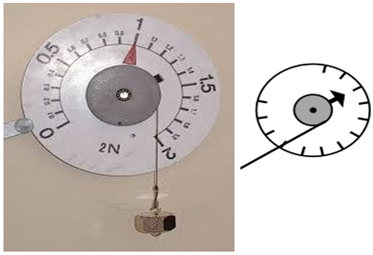
4. Mesure et unité
L'appareil servant à la mesure du poids d'un corps est le dynamomètre
Le poids $P$ s'exprime en newtons $(N)$
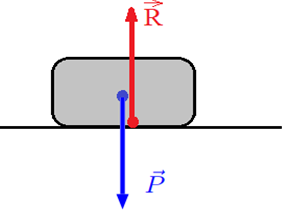
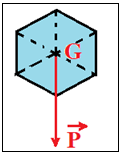
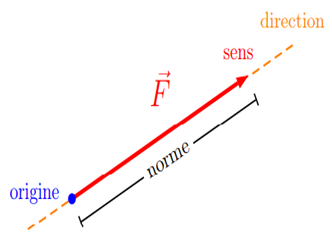
5. Représentation vectorielle
Le poids est une grandeur vectorielle.
On le représente par un vecteur en respectant ses caractéristiques
IV. Relation entre corps et masse
1. Expérience
A l'aide d'une balance et d'un dynamomètre, mesurons respectivement la masse et le poids de différents objets.
On obtient le tableau de valeurs suivantes :
$$\begin{array}{|l|c|c|c|c|c|c|c|c|c|c|} \hline \text{Masse }m\ (kg)&0.1&0.2&0.3&0.4&0.5&0.6&0.7&0.8&0.9&1\\ \hline \text{Poids }P(N)&0.98&1.96&2.94&3.92&4.9&5.88&6.86&7.84&8.82&9.8\\ \hline P/m\ (N/kg)&9.8&9.8&9.8&9.8&9.8&9.8&9.8&9.8&9.8&9.8\\\hline \end{array}$$
$\blacktriangleright\ $Déterminons le rapport $\dfrac{P}{m}$
On constate en un lieu donné, le poids d'un objet est proportionnel à sa masse.
Ce rapport est constant : $\dfrac{P}{m}=9.8N\cdot kg^{-1}$
Cette constante ou coefficient de proportionnalité est égale à l'intensité $g$ du champ de pesanteur au lieu considéré.
$$\dfrac{P}{m}=g\Rightarrow\begin{array}{|}\hline\\&P\text{ en }N\\P=mg&m\text{ en }kg\\&(N\cdot kg^{-1})\\\hline\end{array}$$
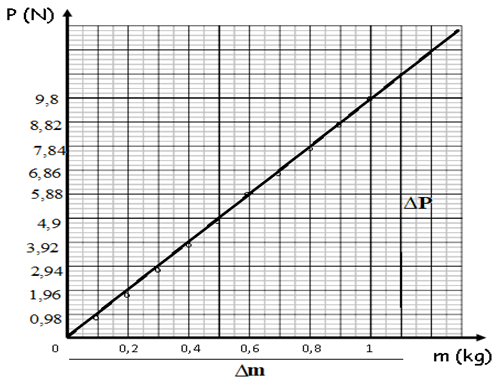
$\blacktriangleright\ $Traçons la courbe représentant les variations du poids $P$ en fonction de la masse $m$
Le graphe représentant le poids $P$ en fonction de la masse $m$ est une droite passant par l'origine de la forme
$P=am\text{ avec : }a=\dfrac{\Delta P}{\Delta m}=\dfrac{10.8-0}{1.1-0}=9.8N\cdot kg^{-1}=g$ étant le coefficient directeur de la droite
$$a=g\Rightarrow\,P=mg$$
2. Caractéristiques du vecteur champ de pesanteur
Le poids est une grandeur vectorielle et la masse une grandeur scalaire.
Le champ de pesanteur est donc une grandeur vectorielle
$$\overrightarrow{P}=m\overrightarrow{g}$$
Le champ de pesanteur $\overrightarrow{g}$ a les caractéristiques suivantes :
$-\ $ Direction : la verticale du lieu
$-\ $ Sens : vers le bas
3. Variation de l'intensité de la pesanteur
Considérons les tableaux de mesures ci-dessous
$$\begin{array}{|c|c|c|c|} \hline \text{Latitude}&\text{Paris}&\text{Pole Nord}&\text{Equateur}\\ \hline g(N\cdot kg^{-1})&9.81&9.83&9.78\\ \hline \end{array}$$ $$\begin{array}{|c|c|c|} \hline \text{Altitude}&\text{Chamonix}&\text{Mont Blanc}\\ \hline g(N\cdot kg^{-1})&9.809&9.806\\ \hline \end{array}$$
On constate que l'intensité de la pesanteur varie :
$-\ $ la latitude du lieu considéré
$-\ $ l'altitude considéré
4. Différences entre le poids et la masse
Il ne faut pas confondre le poids et la masse.
La masse d'un corps est indépendante du lieu.
Le poids d'un corps dépend du lieu où trouve ce corps.
Le poids est une grandeur vectorielle.
La masse est une grandeur scalaire positive.
La masse s'exprime en kilogramme.
Le poids s'exprime en newton.
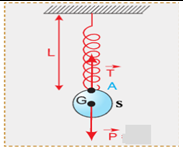
5. Étalonnage d'un ressort
Étalonner un appareil revient après tout à y adjoindre (ajouter) des repères permettant de le mettre à niveau pour jouer le rôle d'instrument de mesure.
5.1. Protocole expérimentale :
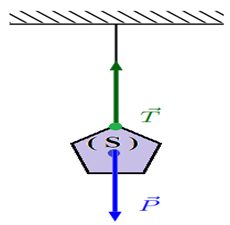
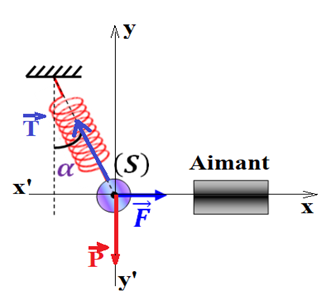
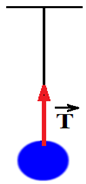
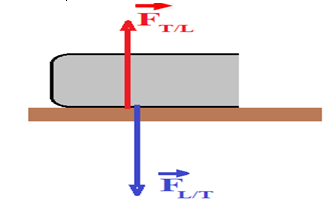
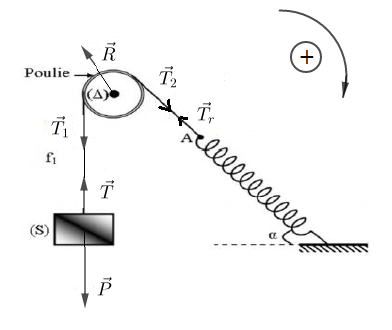
Le solide $S$ exerce sur le ressort une force notée $\overrightarrow{P}.$
De même le ressort exerce une force sur le solide notée $\overrightarrow{T}.$
D'après le principe d'interaction : $\overrightarrow{P}=-\overrightarrow{T}$
En module : $P=T$
Comme $P=mg\Rightarrow\,T=mg$
5.2. Tableau de valeurs
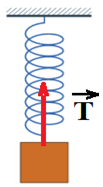
On accroche l'une des extrémités d'un ressort à un support et on le laisse pendre verticalement, le ressort prend une longueur initiale $L_{0}.$
On suspend une masse marquée $M$ à l'extrémité libre du ressort.
Le ressort s'allonge et prend une longueur finale $L.$
Le ressort sera alors allongé de : $\Delta L=L-L_{0}.$
N.B :
Le cas de la compression du ressort : $\Delta L=L_{0}-L$
On accroche des masses différentes successivement.
Les résultats des mesures sont reportés dans un tableau
Tableau de variation de $\Delta L$ avec la masse $m$
$$\begin{array}{|c|c|c|c|c|c|} \hline m(g)&50&100&150&200&250\\ \hline P(N)&0.49&0.98&1.47&1.96&2.45\\ \hline L(m)&0.22&0.24&0.26&0.28&0.30\\ \hline \Delta L(m)&0.02&0.04&0.06&0.08&0.10\\ \hline P/\Delta L(N/m)&24.5&24.5&24.5&24.5&24.5\\ \hline \end{array}$$
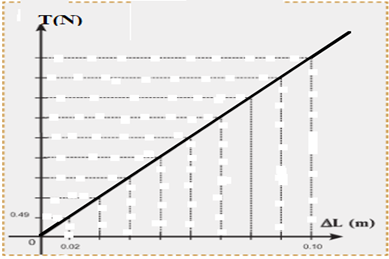
5.2. Exploitation
Le graphique donnant la variation de $T$ avec $\Delta L$, montre que la courbe obtenue est une demi-droite croissante passant par l'origine.
Donc l'intensité $T$ de la tension est proportionnelle à $\Delta L.$
La constante de proportionnalité est note $K$ et s'appelle constante de raideur du ressort et s'exprime en newtons par mètre $(N\cdot m^{-1})$
D'où la relation :
$$T= K\Delta L\quad\text{ou}\quad T=Kx\quad\text{où}\quad x=\Delta L$$
$T$ en $N$, $\Delta L$ ou $x$ en $m$ et $K$ en $N\cdot m^{-1}$